
CKT Pneumatic was founded in 2002 and officially registered the CKT brand in 2005.

Take the responsibility of revitalizing national industry.
Provide you with the latest enterprise and industry news.

Take the responsibility of revitalizing national industry.
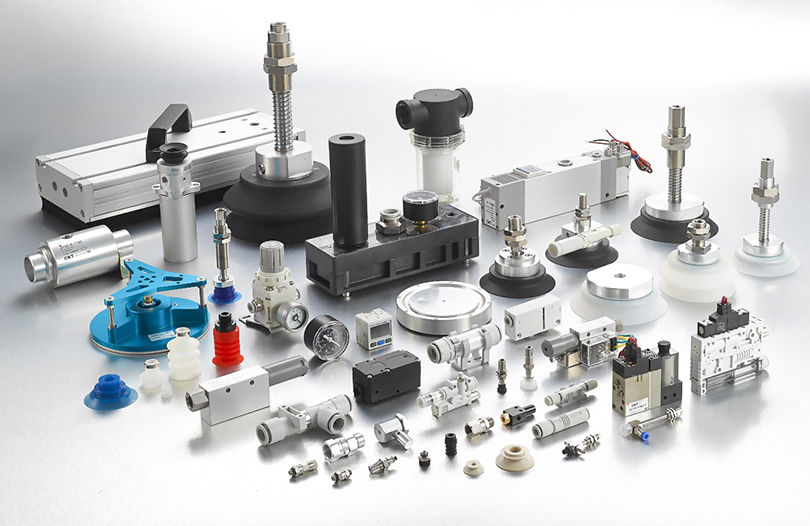
Pneumatic grippers are an end-effector widely used in the field of automation. The core principle is to use compressed air as the driving medium, and through internal air circuit control, convert air pressure energy into mechanical action to achieve the clamping, handling or placement of the target object. This type of device usually exhibits reliable action response and necessary clamping force, and its opening and closing action mode is clear and clear. Thanks to the characteristics of pneumatic drive, it exhibits good environmental adaptability and relatively simple integration in a variety of industrial scenarios. When selecting or designing such a gripper, it is necessary to focus on its load adaptation capability, the matching degree of action characteristics and target object characteristics, so as to ensure that the predetermined tasks are completed stably and effectively throughout the entire production process. Its essence is an automated execution terminal that uses pneumatic drive to achieve the grasping function.
We offer all our products and services at international standards.








 Pneumatic Gripper")
 Pneumatic Gripper")
 Wide Type Pneumatic Gripper")
 / Cam Type 180° Open/Close Pneumatic Gripper")