
CKT Pneumatic was founded in 2002 and officially registered the CKT brand in 2005.

Take the responsibility of revitalizing national industry.
Provide you with the latest enterprise and industry news.

Take the responsibility of revitalizing national industry.
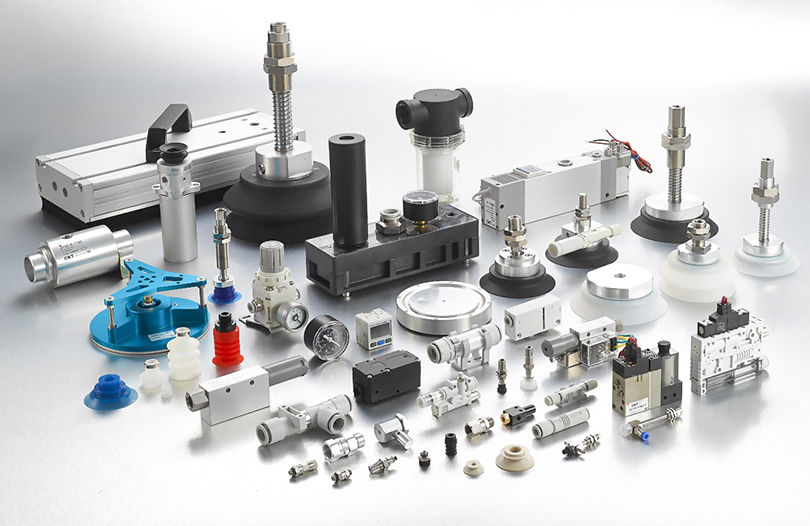
In response to the growing demand for compact space and precision operation in modern automation integration and applications, the ZP series of micro and ultra-micro vacuum gripping units came into being. The design of this series of suction cups focuses on achieving reliable adsorption under extremely limited space constraints, and its miniaturized structure significantly optimizes the layout flexibility of the end effector.
The introduction of the adapter component provides a standard and stable connection interface for the core suction unit, realizes fast and compatible docking with mainstream vacuum generators and pneumatic control circuits, and simplifies the system integration and switching process. The buffer bracket mechanism that works in conjunction with it is crucial in the instantaneous action of adsorption and release. Its built-in flexible buffer mechanism cleverly absorbs and resolves the workpiece positioning, small impacts in the vertical direction, and the unavoidable vibration energy at the end of the robot arm movement, providing effective anti-collision protection for fragile workpieces and precision fixtures, and greatly improving the stability of system operation and the positioning accuracy of grasping.
This combination solution (micro suction cup + adapter + buffer bracket) together constitutes the core elements of an efficient and reliable vacuum end solution for precision and miniaturized picking and handling scenarios.
We offer all our products and services at international standards.









")
